The "Stixth Sense" Smart Mobility Cane - GP3: Physical Prototype
Developed and Built by Andrew Musa, Tahamina Chowdhury, and Christian Salvador

Description
For our final project, Andrew, Tahamina and I were tasked to create a physical prototype that would solve an everday problem. Our prototype required at least one physical input and one physical output. So just like our previous group projects in this course, we got to sketching.
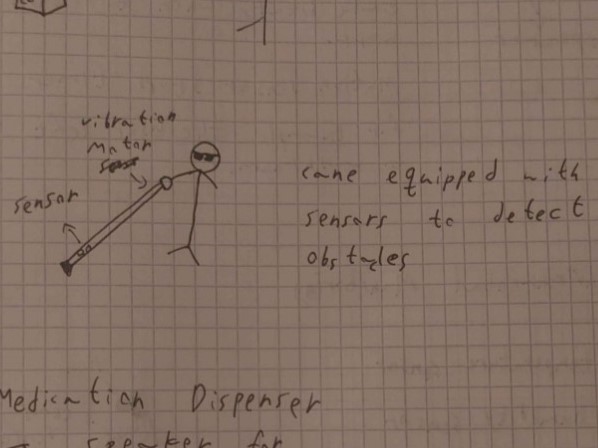
My ideas mainly stemmed from my difficulty in getting out of bed in the morning, though I will get into a bit more detail in the concept sketches section below. The idea we settled on was Andrew's idea of a "Smart Mobility Cane" for the blind. The problem and motivation for this idea arises from the difficulty that individuals with vision impairments and disabilities face from navigating and walking around a space. Some individuals use White Mobility Canes to get tactile information of their surroundings and help them navigate. Andrew thought it would be interesting to provide a solution that builds off of these canes using sensors to detect obstacles for the user, rather than the user having to tap obstacles themselves. After some discussion, we unanimously agreed that we would go with Andrew's idea as we thought attempting to bring about a solution for this problem proved interesting.
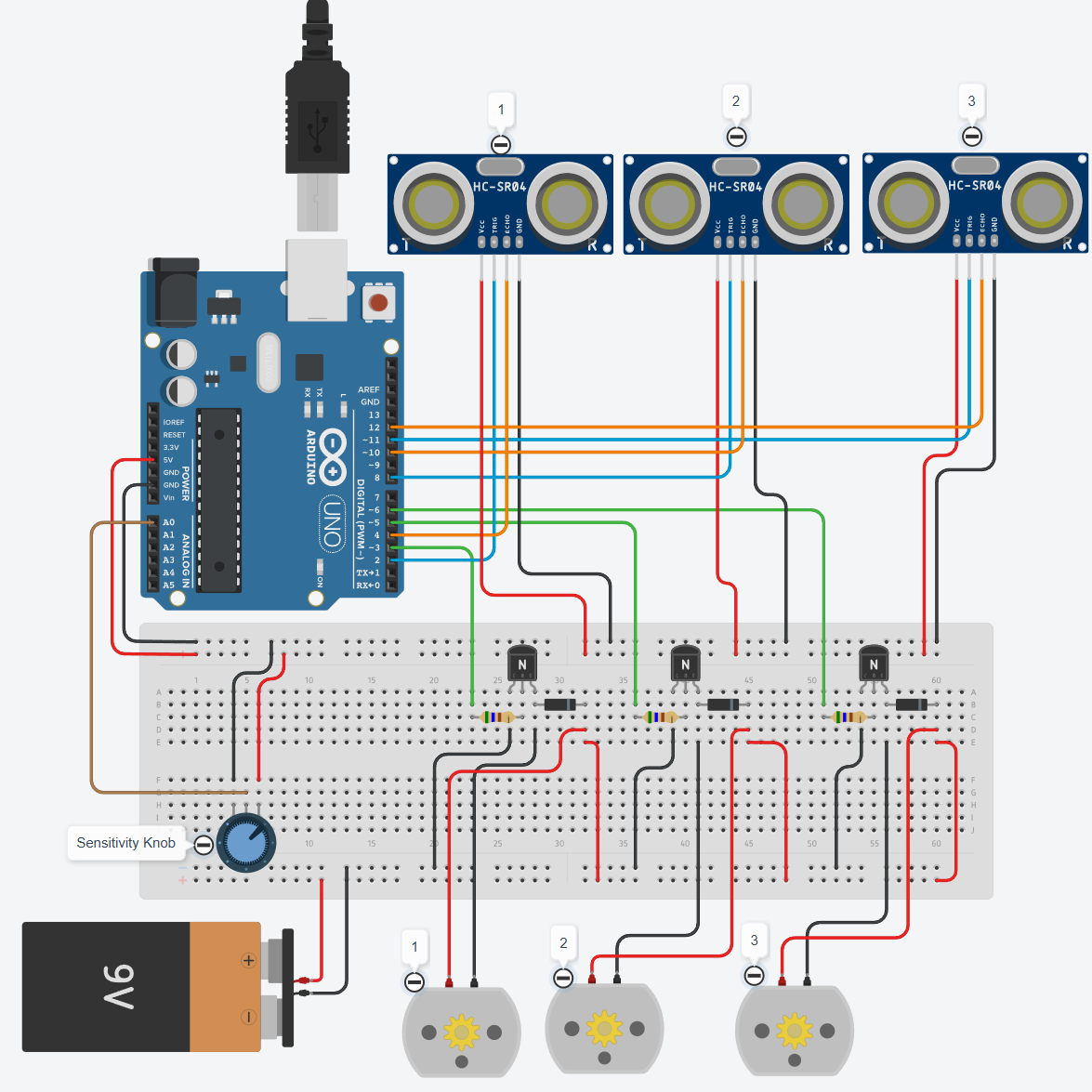
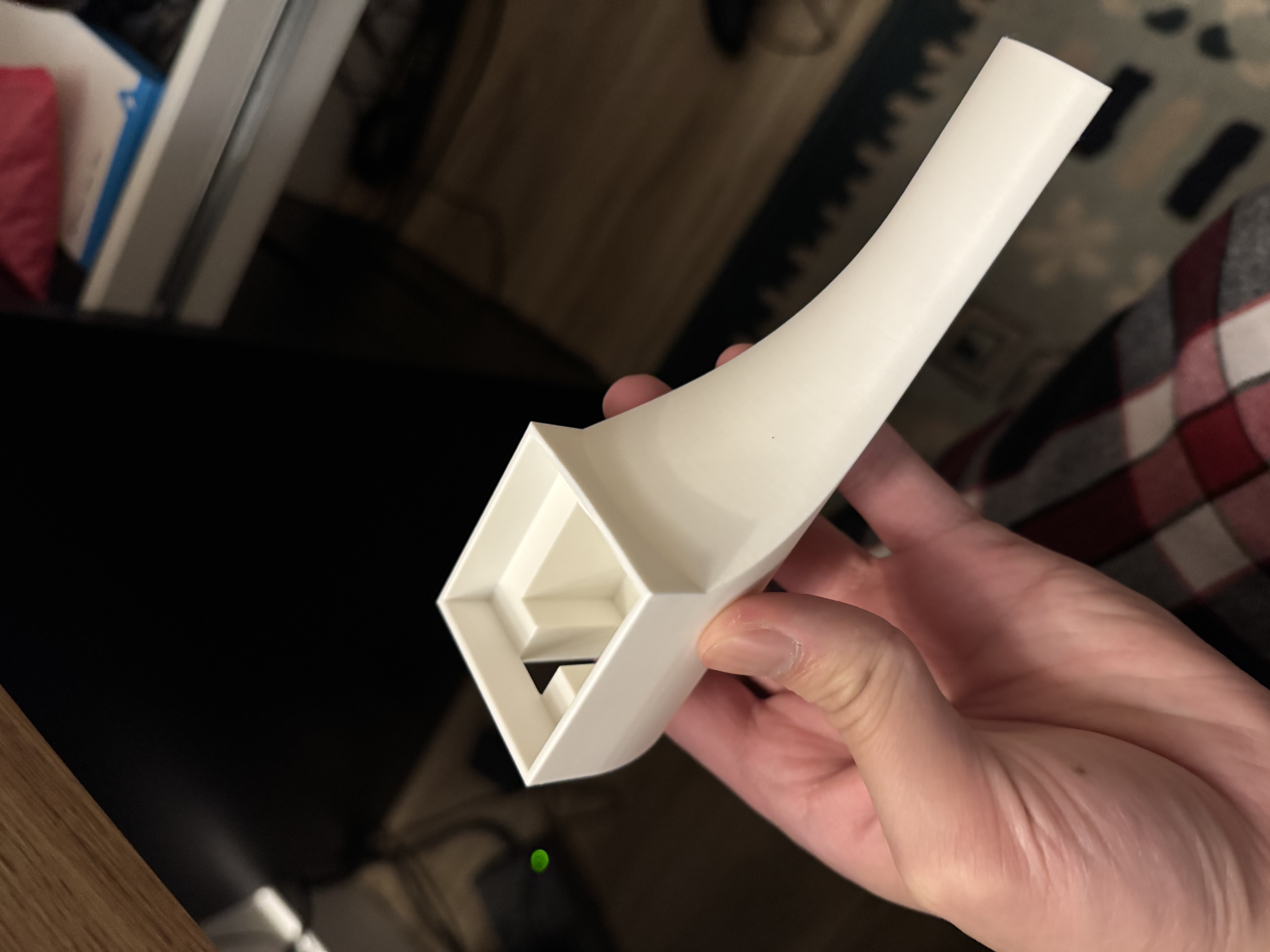
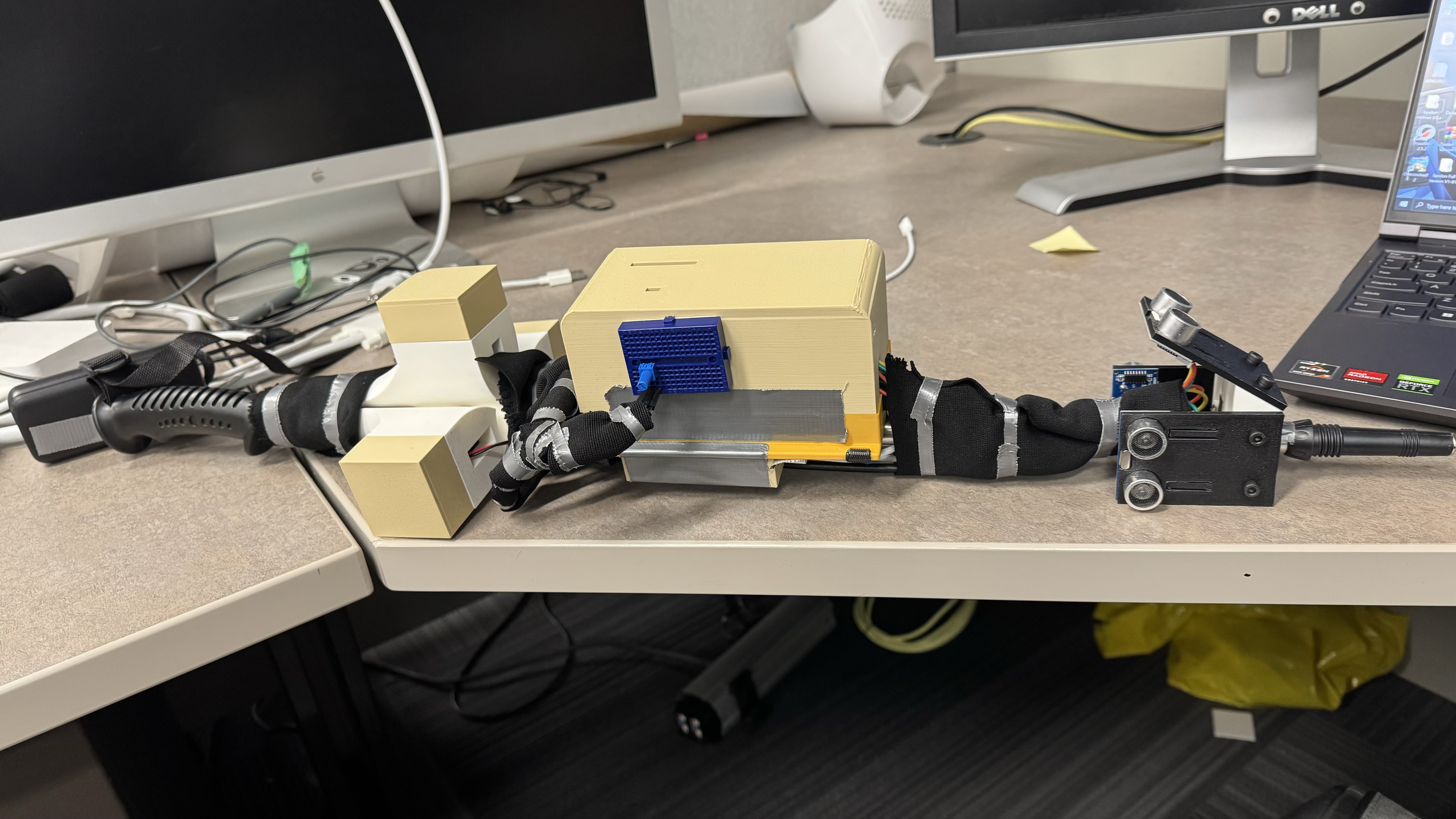
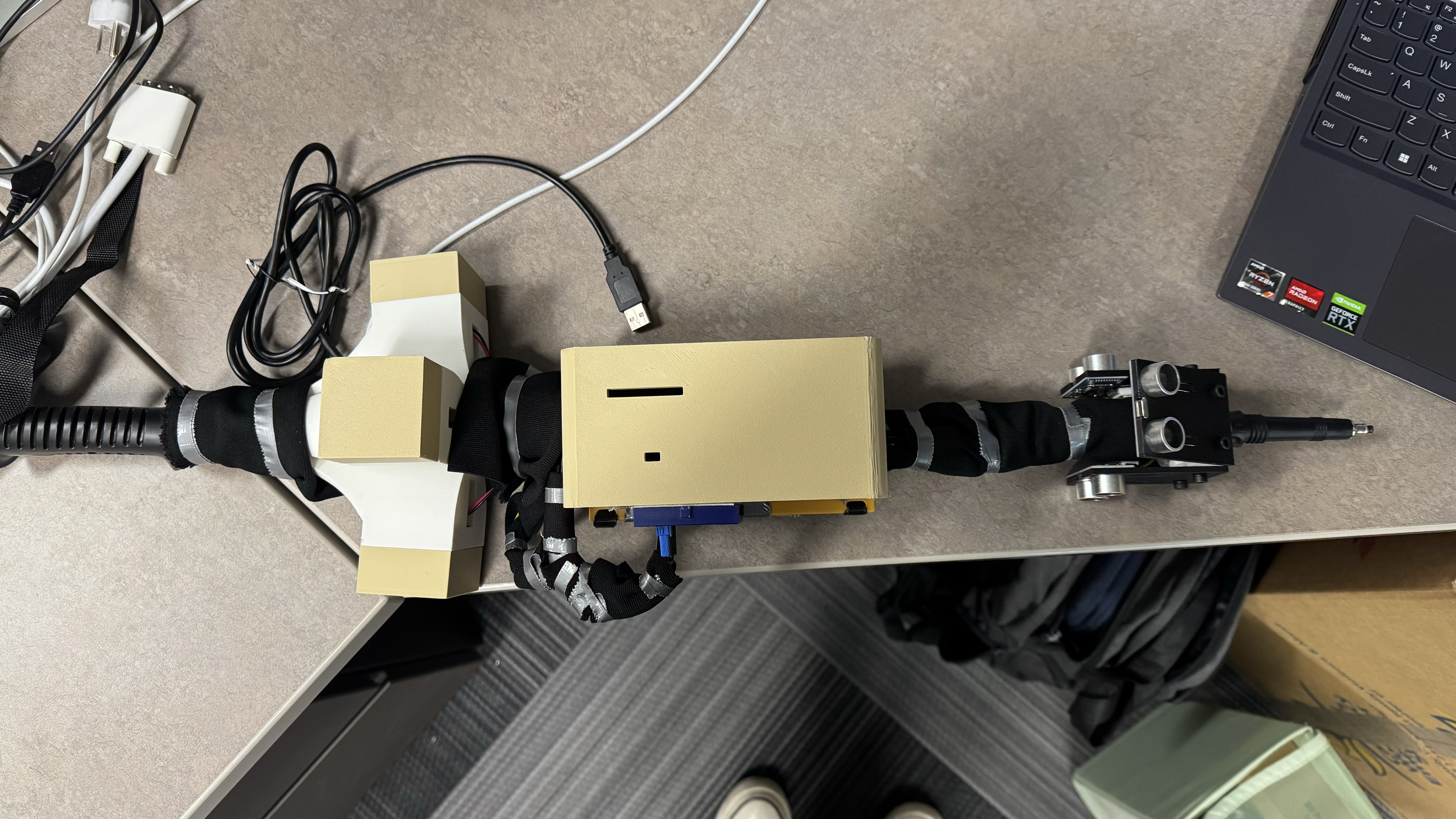
After a few weeks, we finished creating our first prototype of our Smart Mobility Cane which we call the "Stixth Sense" which a fun little pun on the "Sixth Sense." We decided to use a hiking stick as our base for the prototype. Starting at the top of the cane, there are three 3D printed enclosures, each carrying a motor situated at the handle where the user can wrap their hands around. Then further down, we have the main enclosure that holds the circuits and Arduino which keeps them both out of the way and safe. Then further along towards the end of the stick, there are three ultrasonic sensors facing the left, right and front of the user. This gives us sensor data from those three directions.
How the device works is that each of the three ultrasonic sensors are linked to their own motor that faces the same direction, so as an example, the motor on the left of the handle is linked to the ultrasonic sensor facing left. When an object is detected by either of those ultrasonic sensors, their respective motors will activate. Offset weights are attached to the motors so that they provide a vibration-like sensation. The enclosures are designed in a way that they are all completely separate and surrounded by foam to not disturb other enclosures. This allows us to get the directional feeling of the vibrations, allowing us to figure out where the sensors are picking up objects.
An additional feature we have is an exposed potentiometer which acts as a sensitivity setting for the ultrasonic sensors. By turning it, a user can decrease or increase the sensors' range, allowing control over how far a user would like to detect objects. This is pretty much it for the prototype and although it seems quite basic, I would say it was quite interactive and fun to mess around with. From my own observations, I would say peers would agree based on the positive reactions they gave when interacting with the cane themselves during our demo.
10 Concept Sketches
For my 10 concept sketches, I first sketched out 4 concept sketches. Unfortunately, at the time I was too busy and was only able to create 4 original concept sketches for my group, however, I did create 10 refined sketches that I will share a few of to make up for the last 6 concept sketches. These refined sketches involve adding onto previous original concept sketches made by all three of us.
The first sketch shows Andrew's idea which we decided to use for our project. The next few sketches showcased below are sketches I drew that either I thought would have been a pretty interesting alternative prototype to build or contributed to the final product.
Refined Sketch 5 and 6: These sketches were based on an anti sleep system that I drew in one of my original 4 concept sketches. Both utilize a force sensor set up in a way that putting an alarm on snooze triggers the device. In both devices, an enclosed system involving a hammer and pot are designed such that it annoys the user to get out of bed to disable the device. In sketch 5, the user just simply needs to get off the bed to disable it. However, sketch 6 introduces another step that can be considered annoying yet a positive thing for someone to do. That is, it introduces a puzzle that a user must solve to disable the device, which thinking about it, would be absolutely horrible but it would get the blood flowing into the brain I suppose. If you look at Sketch #2 in the carousel, you will see that I initially had the idea of using a balloon to wake the user up but a balloon popping is only a one-time loud sound, unlike a hammer banging on a pot...
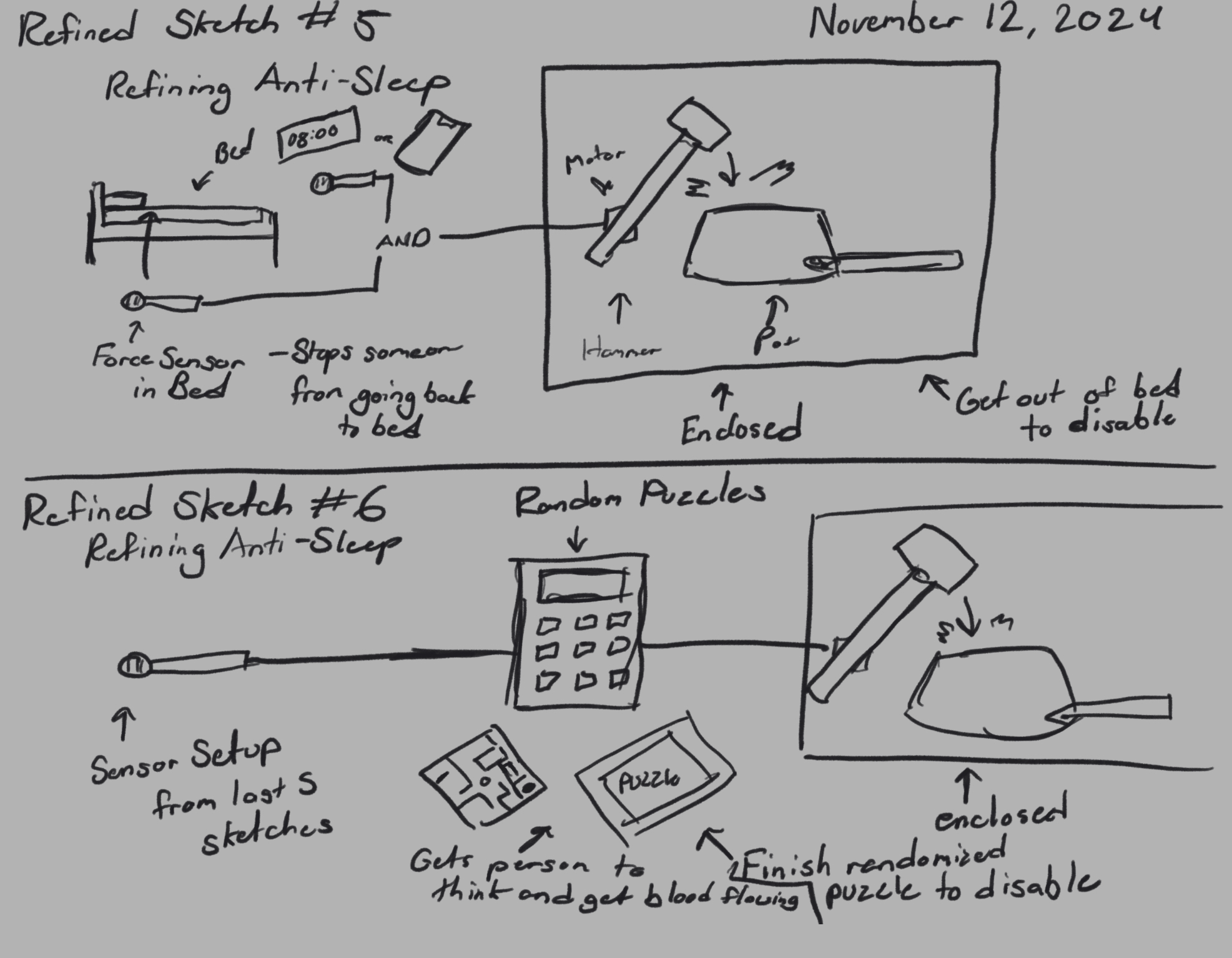
Sketch #5 & #6: Refined Anti-Sleep In System
Refined Sketch 7 and 8: These sketches were much more simpler than 5 and 6 but they did introduce possible sensors that we could use for our prototype. Of course, we settled on using ultrasonic sensors like in my sketch 7, which is also drawn in a way that it is tilted so that the cane can be pointed slightly forward without obstructing or impacting the sensor. It also shows the use of a motor with a weight offset to create a bit of haptic feedback in the handle area like Andrew's initial sketch.
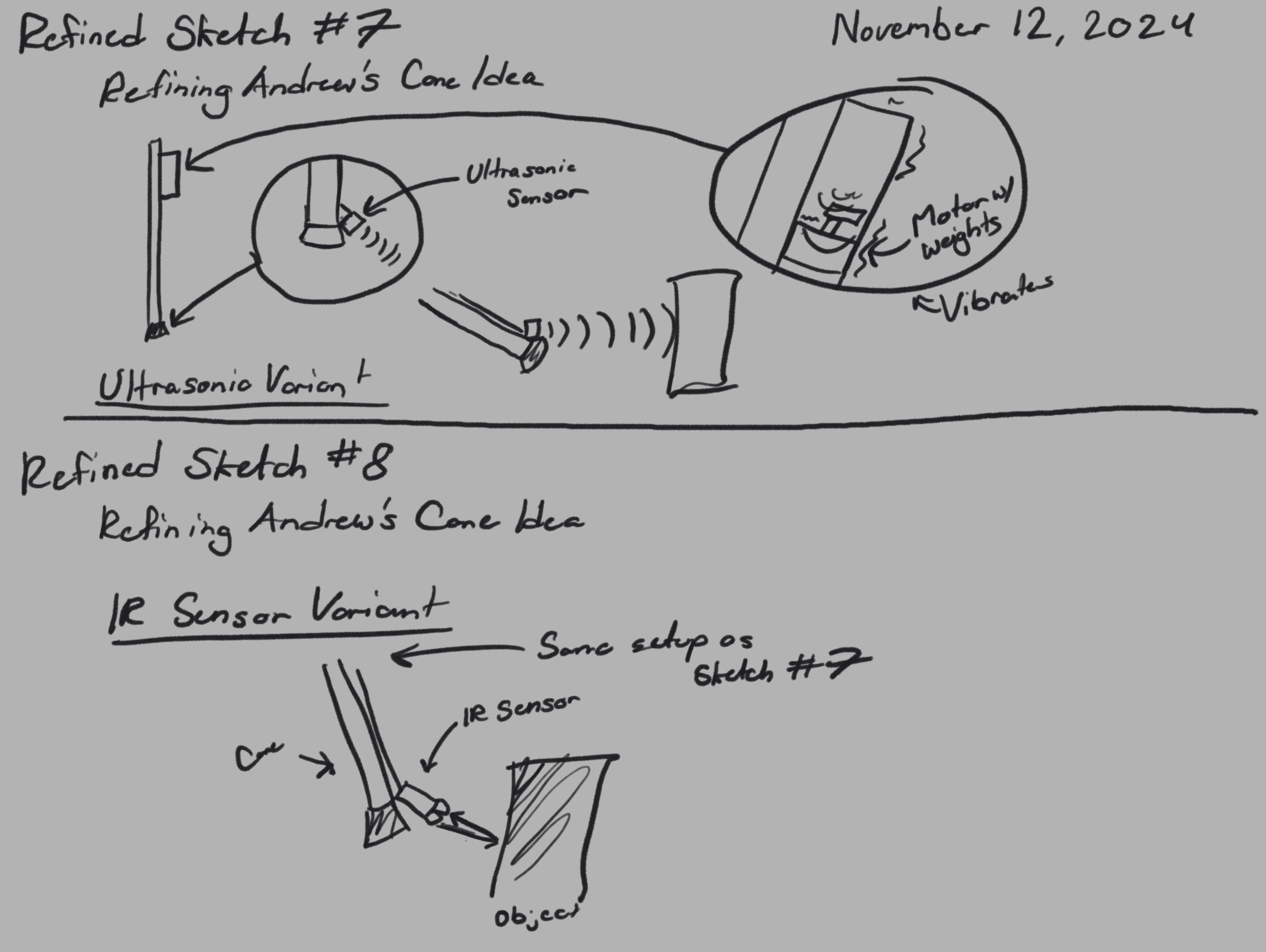
Sketch #7 & #8: Refining Andrew's Smart Cane - Introducing Fitting Sensors
Below are the rest of the 10 concept sketches I had created. The row images below can be scrolled horizontally.
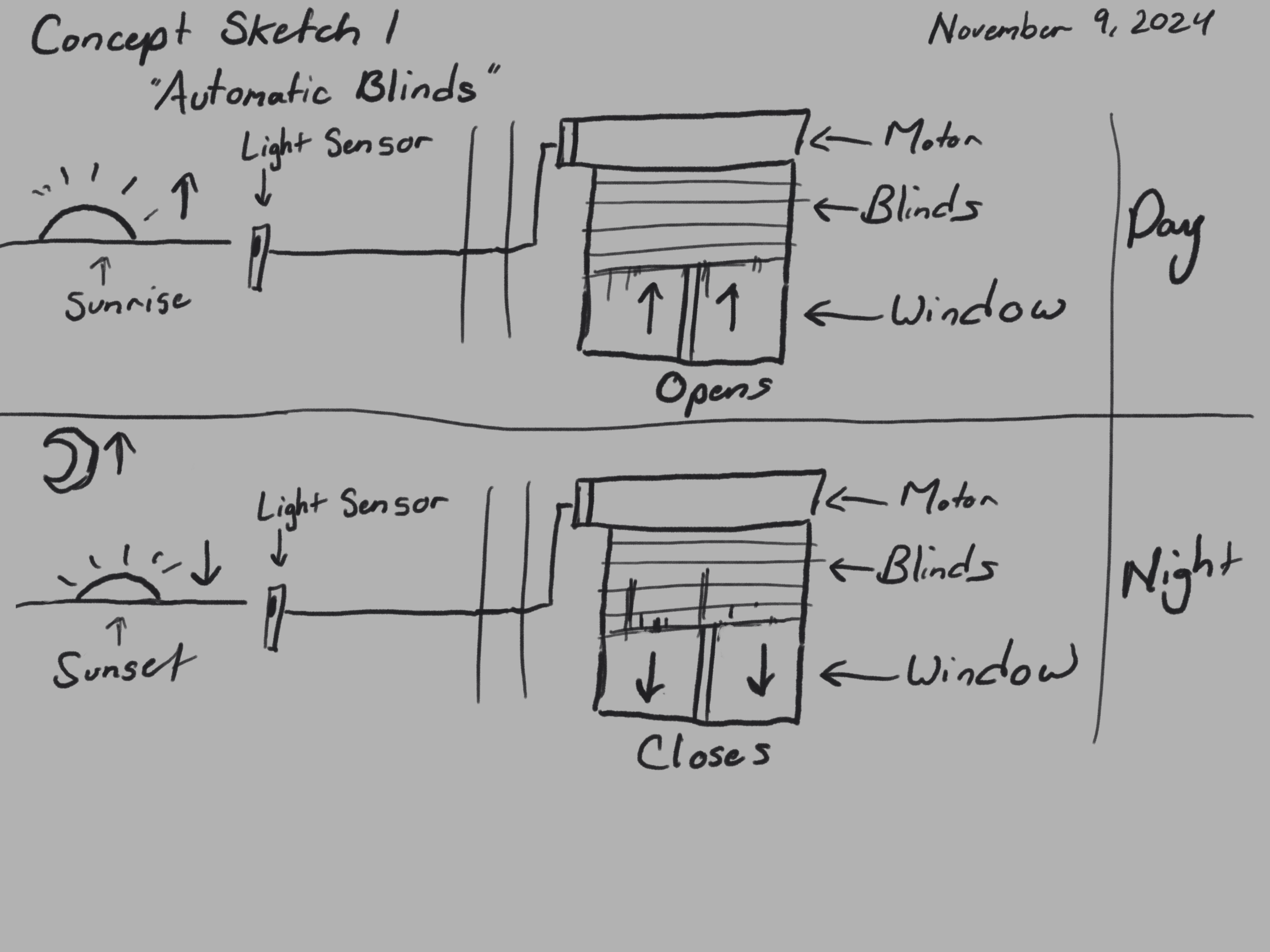
Sketch #1: Automatic Blinds System
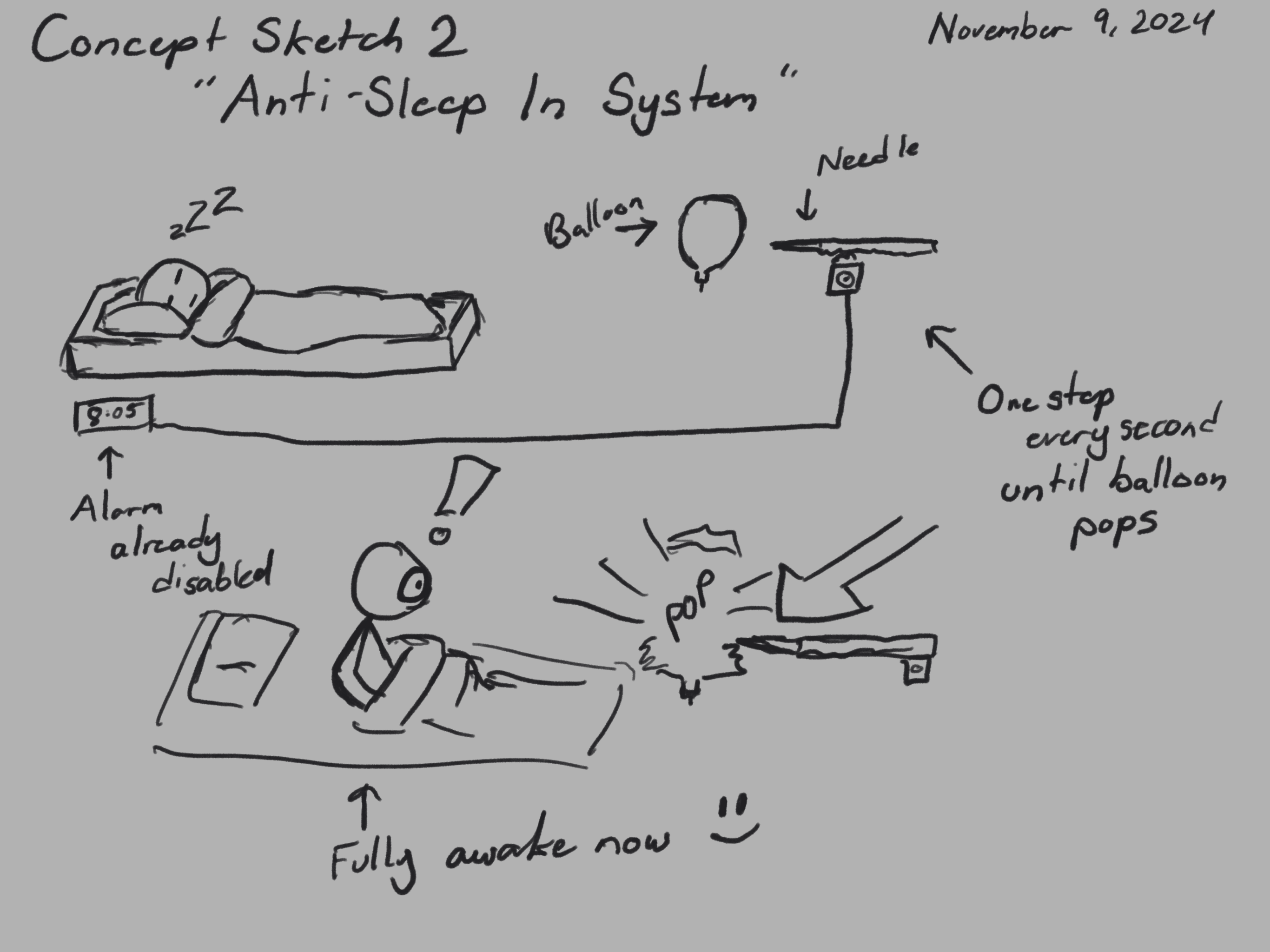
Sketch #2: The Initial Anti-Sleep In System With A Balloon
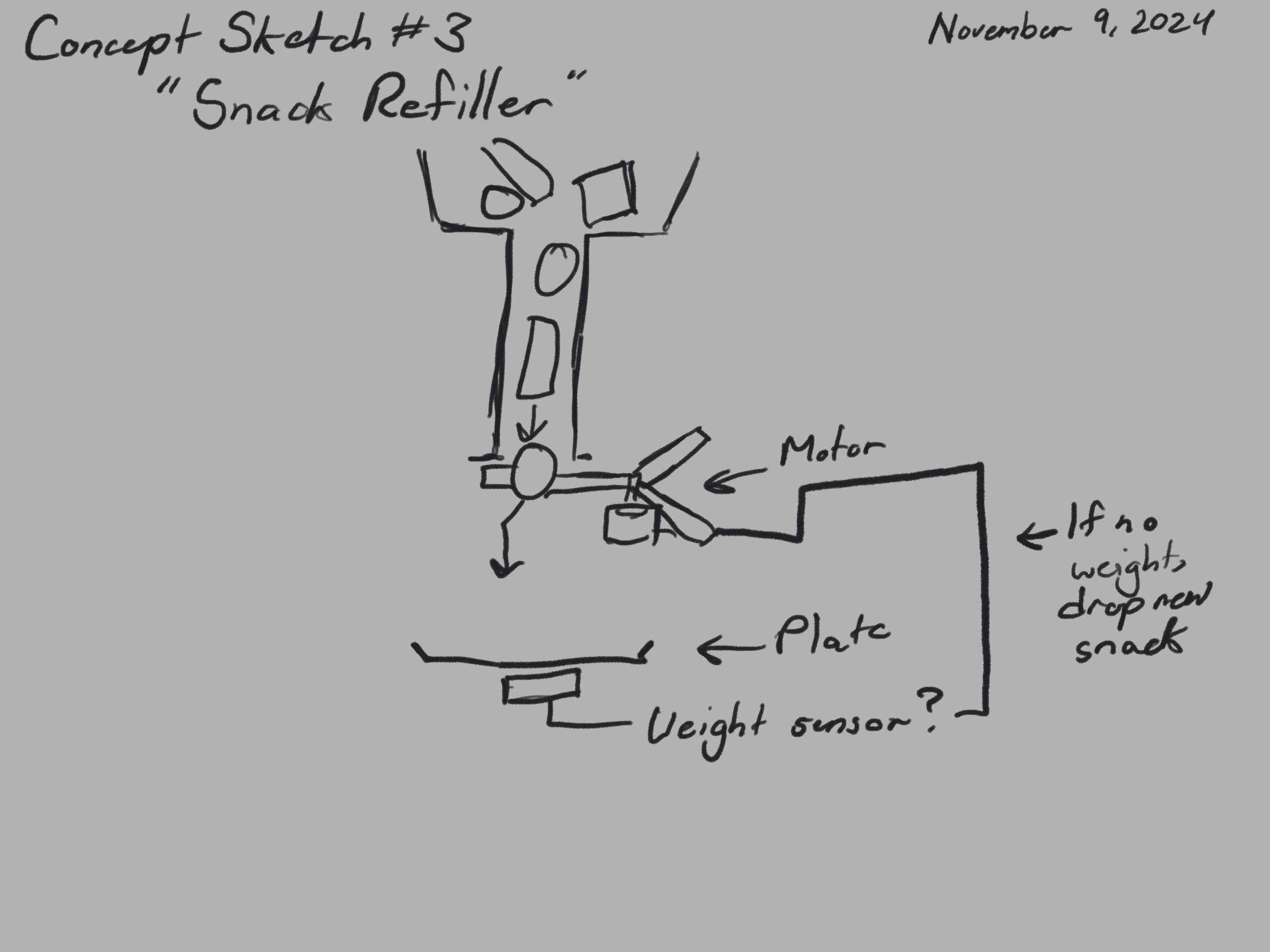
Sketch #3: Auto Snack Refiller System
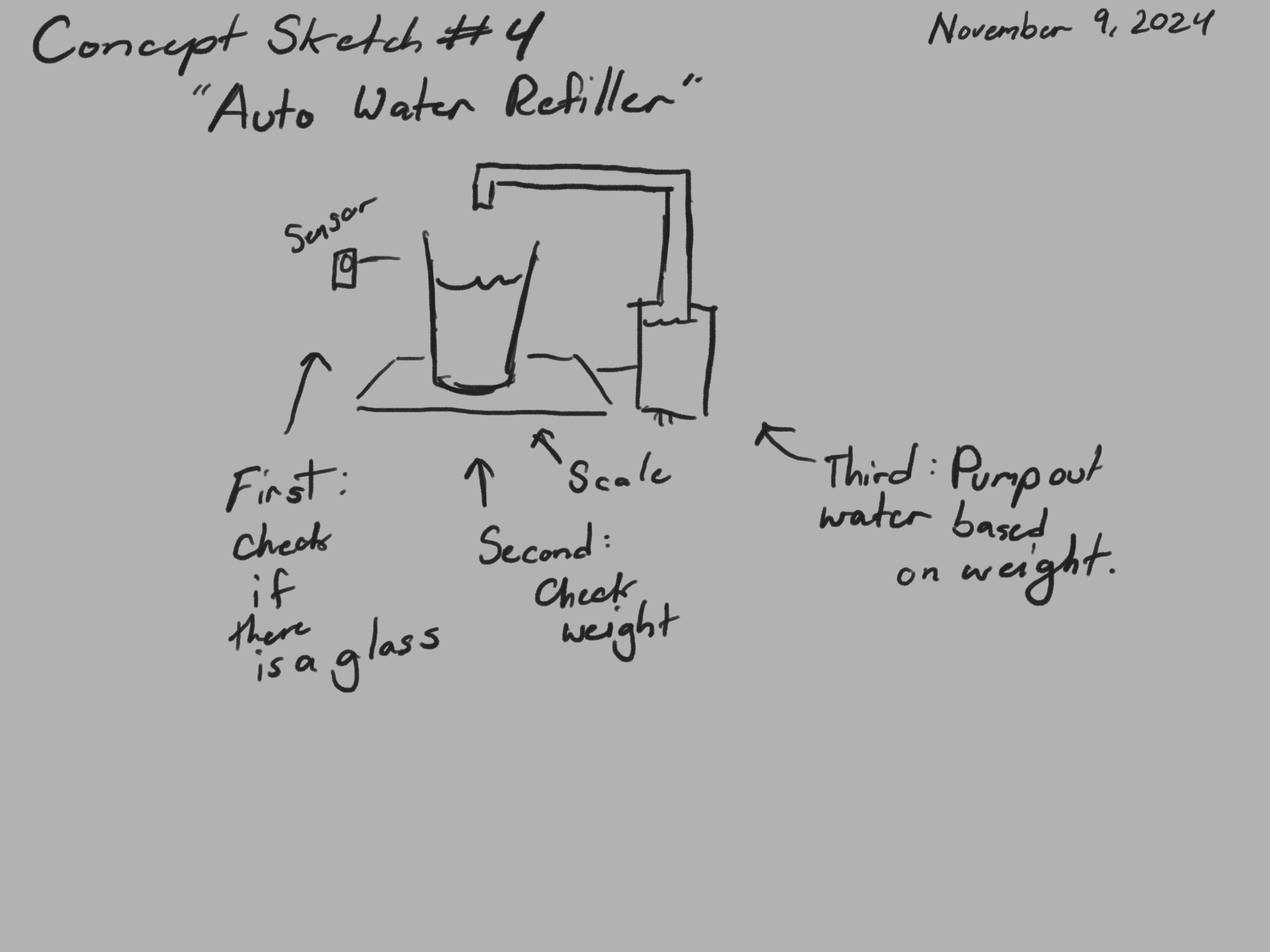
Sketch #4: Automatic Water Refill System
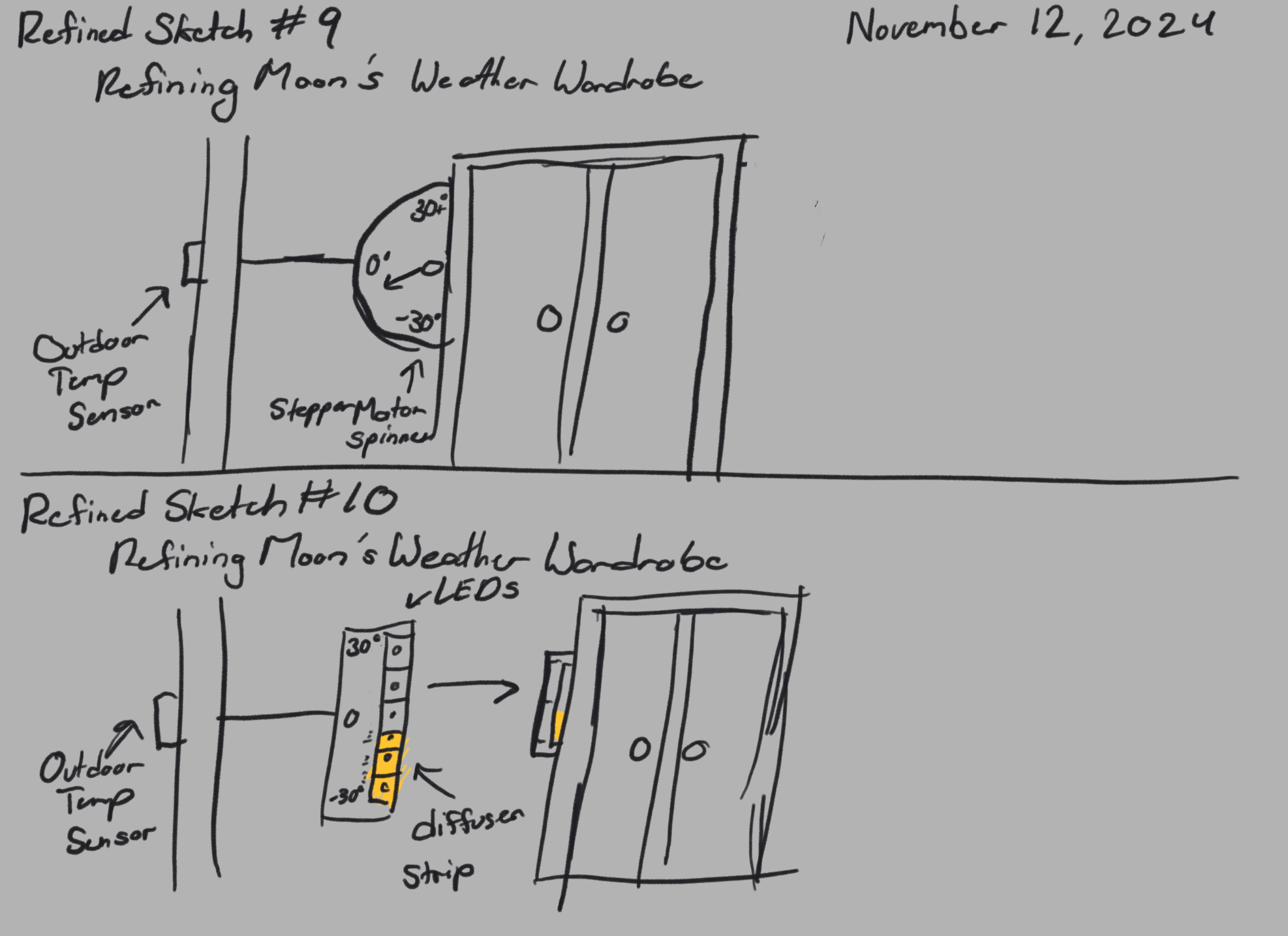
Sketch #9 & #10: Refining Tahamina's Weather Wardrobe System
Storyboard
Here is a drawn out storyboard for the interactions in our group project. I have also provided simple descriptions of the frames in text.
- First 2 Frames: Blind man shown with and without our smart cane.
- Next 6 Frames: Showcases the motor and ultrasonic sensor positions and how they are linked together.
- Next Frame: Vibrations with the corresponding colors show where vibrations are felt.
- Last 3 Frames: Shows our sensor sensitivity knob to change the sensor distance.
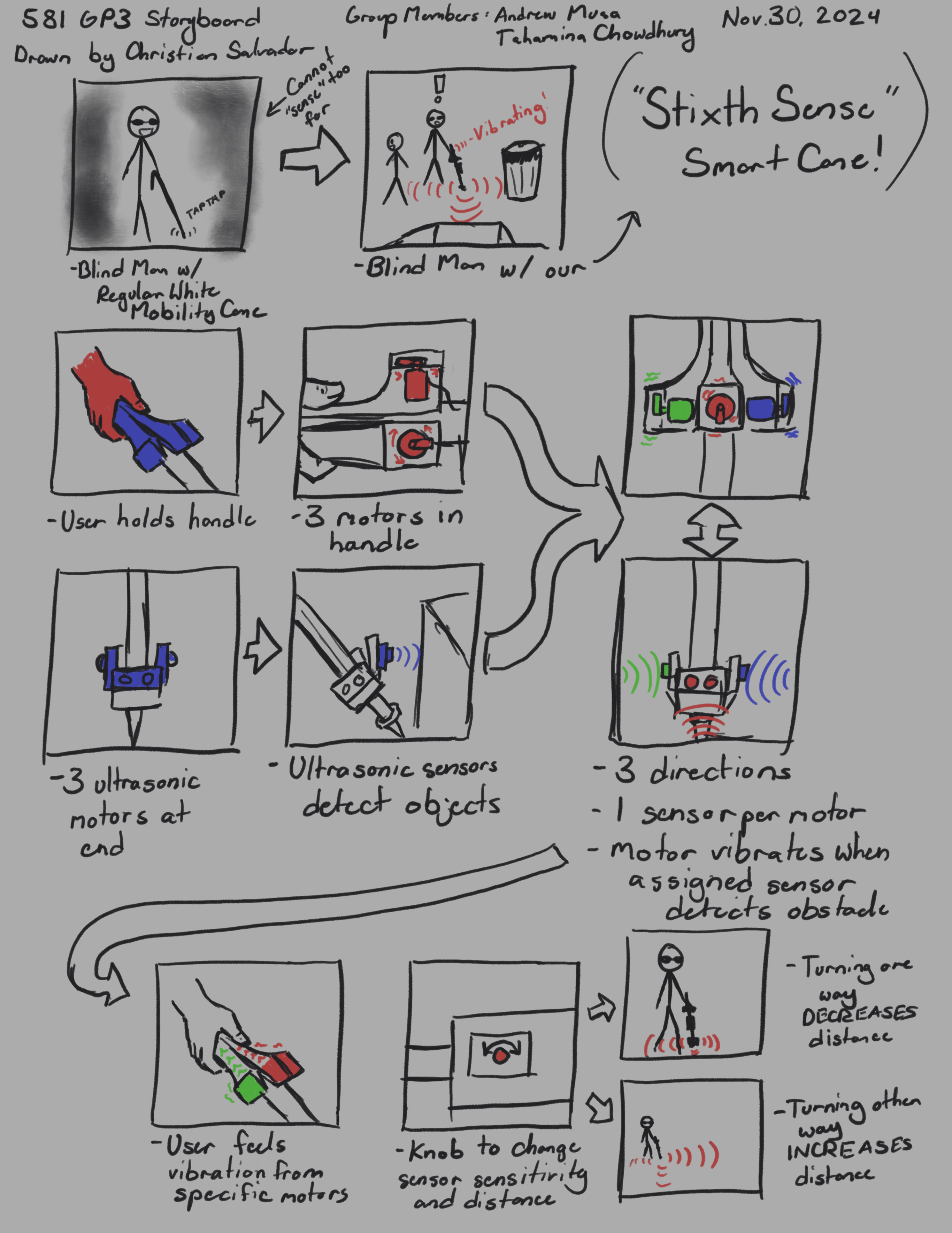
"Stixth Sense" Smart Cane Storyboard - Click to enlarge


Concept Development Videos
This section shows some videos taken during the process of making the smart mobility cane.
[SOUND WARNING] Initial Prototype "Squid" Motor Test
[SOUND WARNING] Motor Power and Vibrations Test
Demo Video - Click Here If Embed Doesn't Work
CPSC 581 "Stixth Sense" Smart Mobility Cane Demo Video
Final Product Reflection
My Contribution
My main contributions were designing the physical layout of the cane (e.g., the placements of the motors, arduino and ultrasonic sensors), 3D printing a few parts of the cane, and doing final touchups on the overall circuitry for the cane. For the physical layout, I came up with the idea of creating separate enclosures for the motors surrounded by cloth and foam so that they do not interfere with each other. Then I 3D printed snap-on connectors for the ultrasonic sensors and re-used the arduino enclosure from my Finger Drums project for this project. I had also noticed some weird power issues when we initially connected the motors to the Arduino pins, and so I fixed the circuit so that the motors draw power from a separate power source.
Team Reflection
I would say our team was balanced overall. It was difficult trying to split tasks for a physical project like this since we cannot split both the physical prototype and Arduino kits, so one person would deal with the physical prototype and the other would deal with the Arduino kit hardware. I was tasked with handling the prototype design and Andrew handled making the initial circuit design and code. Since we cannot really split these two tasks easily, Tahamina opted to handle all the documentation and creation of the demo video which was extremely helpful due to how hectic the last few weeks of the Fall term have been. So overall, I am very happy with the contribution each team member put in and we would not have what we have without them.
Objective
I believe our project fit well within the objective of this project. Our smart mobility cane is a solution to an everyday problem that individuals with visual impairments and disabilities face. Our smart mobility cane draws inspiration from the white mobility canes often used by these individuals and attempts to build off of it by extending the range whilst still providing tactile feedback in a similar way to how a person taps with the cane. Our project utilizes three ultrasonic sensors, each paired with their own motor that is positioned at the handle of the cane, therefore giving us our one physical input and output. I am also very happy with how interactive our device was, as although it is quite simple, I was amazed that we actually created a working prototype with directional feedback through vibrations and often played around with it once the prototype was complete. I also tried covering up the wiring as best I can to hide wires, giving it an interesting look with some spare spandex fabric I had lying around.
What Could Have Been
There were a few extra ideas that my group wanted to add onto the cane, however, we did not have time and were faced with a lot of bugs from attempting to implement the ideas. Our first idea was a button to toggle the cane on and off so that it is not always active. Unfortunately, there seemed to have been a bug where the button's pin kept thinking it was toggling on and off resulting in unstable behaviour. Another idea we had in mind was adding a touch capacitor sensor at the handle, so that not only does it have to be turned on, but someone must be actively holding the cane for it to activate the sensors and motors. One last idea was to add another knob that would alter the strength of the motors so that a user can control the power of the feedback that they felt. If we had more time, I feel like these additions would have been great to have.
What Worked
There is almost nothing that I believe did not work out for the project. So for what I thought did work, I would say using a hiking stick for a project prototype worked out well as it gave us a very nice base to work with. Furthermore, I would say my initial designs of the motor enclosures worked really well with their first iterations which was quite surprising. I found that I did not need to return to the drawing board for those. What also worked out was my re-used enclosure from my Finger Drums project so I did not have to design an enclosure from scratch, giving us more time to polish our project up. I am also very pleased with how interactive this seemingly basic prototype was. The directional feedback was unexpectedly well felt through the handle and the reactions from our peers trying it out during our demo of it in class proved that it was both working well and quite interactive.